BioNeRF#
Biologically Plausible Neural Radiance Fields for View Synthesis

Biologically Plausible Neural Radiance Fields
Installation#
Install nerfstudio dependencies.
Method#
Overview#
BioNeRF (Biologically Plausible Neural Radiance Fields) extends NeRF by implementing a cognitive-inspired mechanism that fuses inputs from multiple sources into a memory-like structure, thus improving the storing capacity and extracting more intrinsic and correlated information. BioNeRF also mimics a behavior observed in pyramidal cells concerning contextual information, in which the memory is provided as the context and combined with the inputs of two subsequent blocks of dense layers, one responsible for producing the volumetric densities and the other the colors used to render the novel view.
Pipeline#
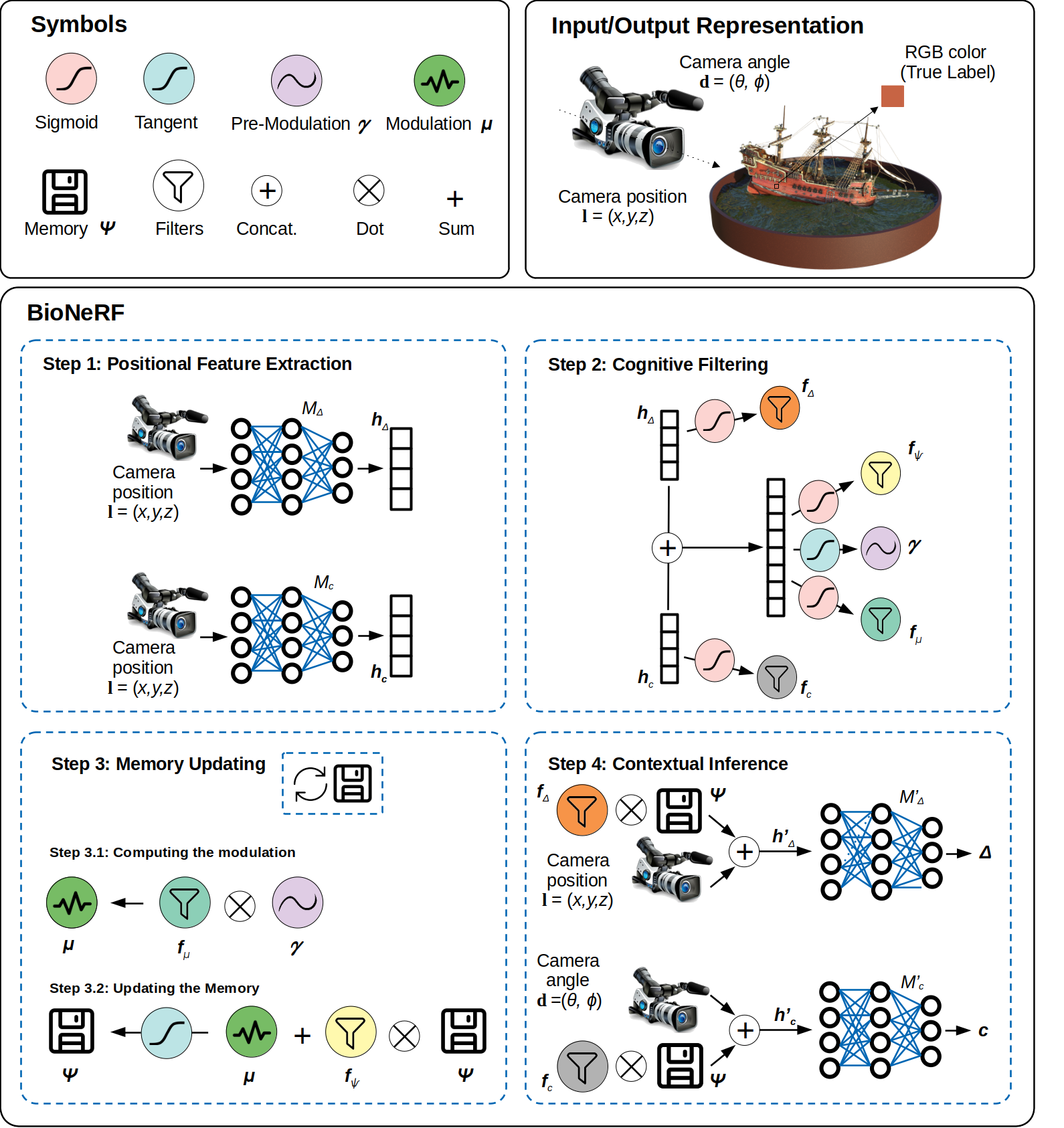
Here is an overview pipeline for BioNeRF, we will walk through each component in this guide.
Positional Feature Extraction#
The first step consists of feeding two neural models simultaneously, namely \(M_{\Delta}\) and \(M_c\), with the camera positional information. The output of these models encodes the positional information from the input image. Although the input is the same, the neural models do not share weights and follow a different flow in the next steps.
Cognitive Filtering#
This step performs a series of operations, called filters, that work on the embeddings coming from the previous step. There are four filters this step derives: density, color, memory, and modulation.
Memory Updating#
Updating the memory requires the implementation of a mechanism capable of obliterating trivial information, which is performed using the memory filter (Step 3.1 in the figure). Fist, one needs to compute a signal modulation \(\mu\), for further introducing new experiences in the memory \(\Psi\) through the modulating variable \(\mu\) using a \(\textit{tanh}\) function (Step 3.2 in the figure).
Contextual Inference#
This step is responsible for adding contextual information to BioNeRF. Two new embeddings are generated, i.e., \({h}^{\prime}_\Delta\) and \({h}^{\prime}_c\) based on density and color filters, respectively (Step 4 in the figure), which further feed two neural models, i.e., \(M^\prime_\Delta\) and \(M^\prime_c\). Subsequently, \(M^\prime_\Delta\) outputs the volume density, while color information is predicted by \(M^\prime_c\), further used to compute the final predicted pixel information and the loss function.
Results#
Blender (synthetic)
drums |
materials |
ficus |
ship |
mic |
chair |
lego |
hotdog |
AVG |
|
|---|---|---|---|---|---|---|---|---|---|
PSNR |
25.66 |
29.74 |
29.56 |
29.57 |
33.38 |
34.63 |
31.82 |
37.23 |
31.45 |
SSIM |
0.927 |
0.957 |
0.965 |
0.874 |
0.978 |
0.977 |
0.963 |
0.980 |
0.953 |
LPIPS |
0.047 |
0.018 |
0.017 |
0.068 |
0.018 |
0.011 |
0.016 |
0.010 |
0.026 |
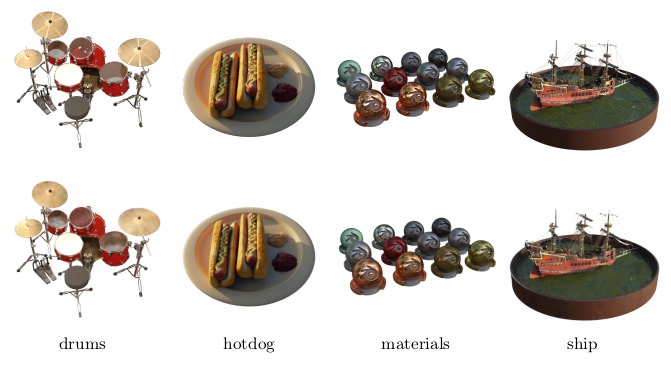
Ground-truth (top) and synthetic view (bottom) images generated by BioNeRF regarding four Realistic Blender dataset’s scenes.
LLFF (real)
Fern |
Flower |
Fortress |
Horns |
Leaves |
Orchids |
Room |
T-Rex |
AVG |
|
|---|---|---|---|---|---|---|---|---|---|
PSNR |
25.17 |
27.89 |
32.34 |
27.99 |
22.23 |
20.80 |
30.75 |
27.56 |
27.01 |
SSIM |
0.837 |
0.873 |
0.914 |
0.882 |
0.796 |
0.714 |
0.911 |
0.911 |
0.861 |
LPIPS |
0.093 |
0.055 |
0.025 |
0.070 |
0.103 |
0.122 |
0.029 |
0.044 |
0.068 |
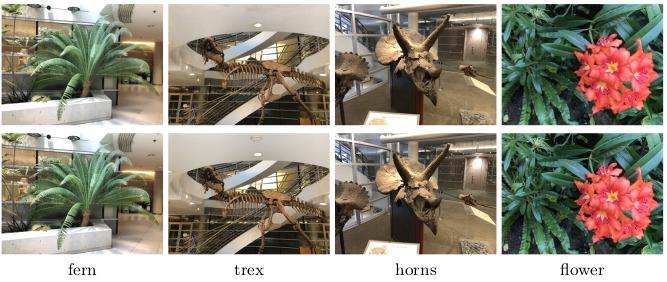
Ground-truth (top) and synthetic view (bottom) images generated by BioNeRF regarding four LLFF dataset’s scenes.